- Technique de vissage
-
Solutions d'alimentation
- Guide en 6 étapes pour choisir la technique d'alimentation appropriée
- Bol d'alimentation vibrant eacy feed
- Système d'alimentation à lames eacy step feed
- Chargeur par rail conducteur DEPRAG
- Convoyeurs linéaires
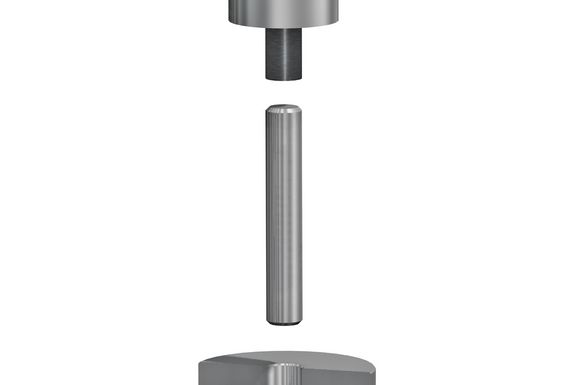
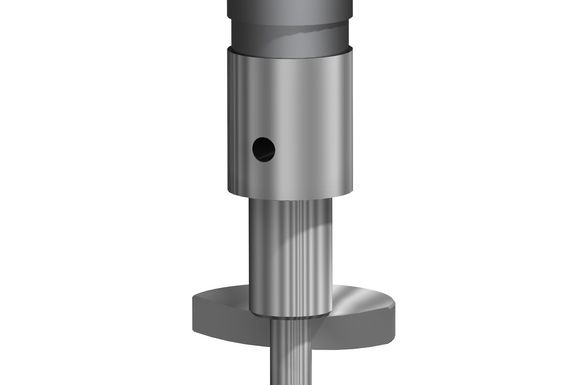
- Systèmes d'insertion par pression
- DEPRAG Clean Feed
- DEPRAG Mini Screw Feeder
- DEPRAG Feed Module
- Automation
-
Applications
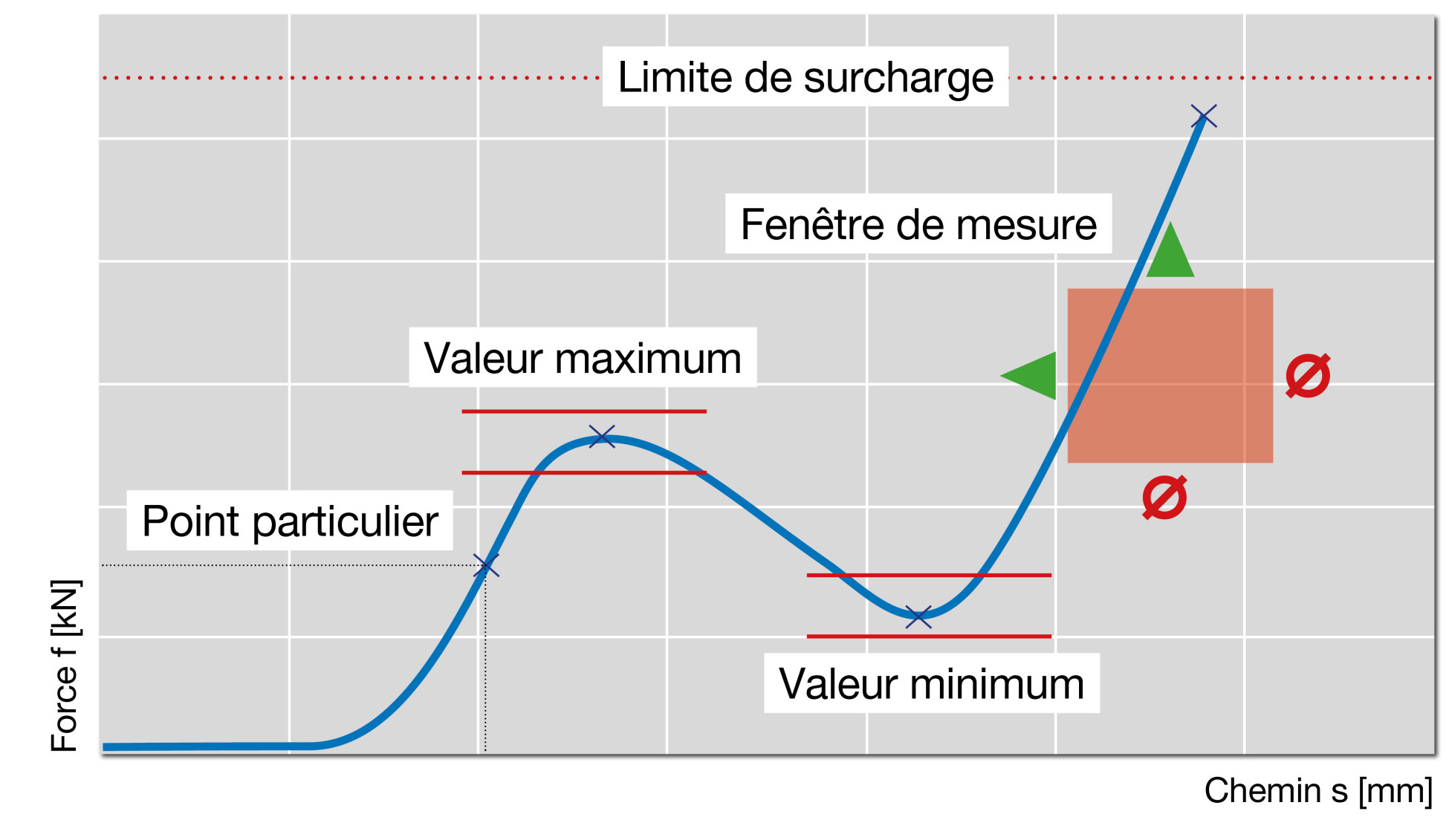
- Vissage selon le couple de serrage
- Vissage selon l’angle de rotation
- Vissage par la méthode du coefficient de frottement
- Vis fluo-extrudeuses
- Modules de fonctions de vissage légers
- Clamp Force Control
- Technische Sauberkeit in der Schraubmontage
- Prévention des troubles musculosquelettiques
- Séparation des vis dans l’automatisation de la fabrication
- Insights