AxNum verfügt über ein umfassendes Sortiment an Miniatur und Hochpräzisions Linearmotoren für anspruchsvolle Applikationen.
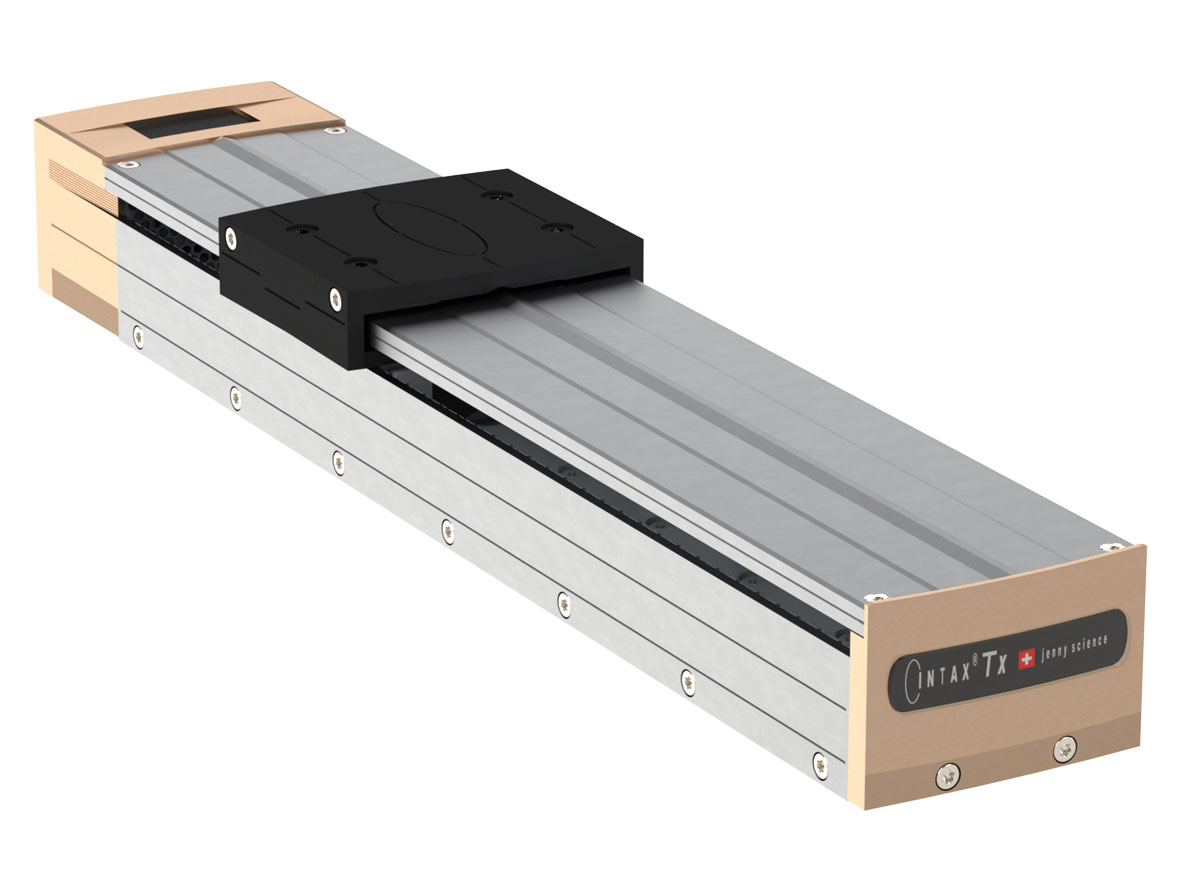
Dieser Linearmotor zeichnet sich durch seine kompakte Bauweise, seine dynamische Leistung und vor allem durch die vollständige Integration des Servodrives, der Motorverkabelung und des Kabelschlepps aus.
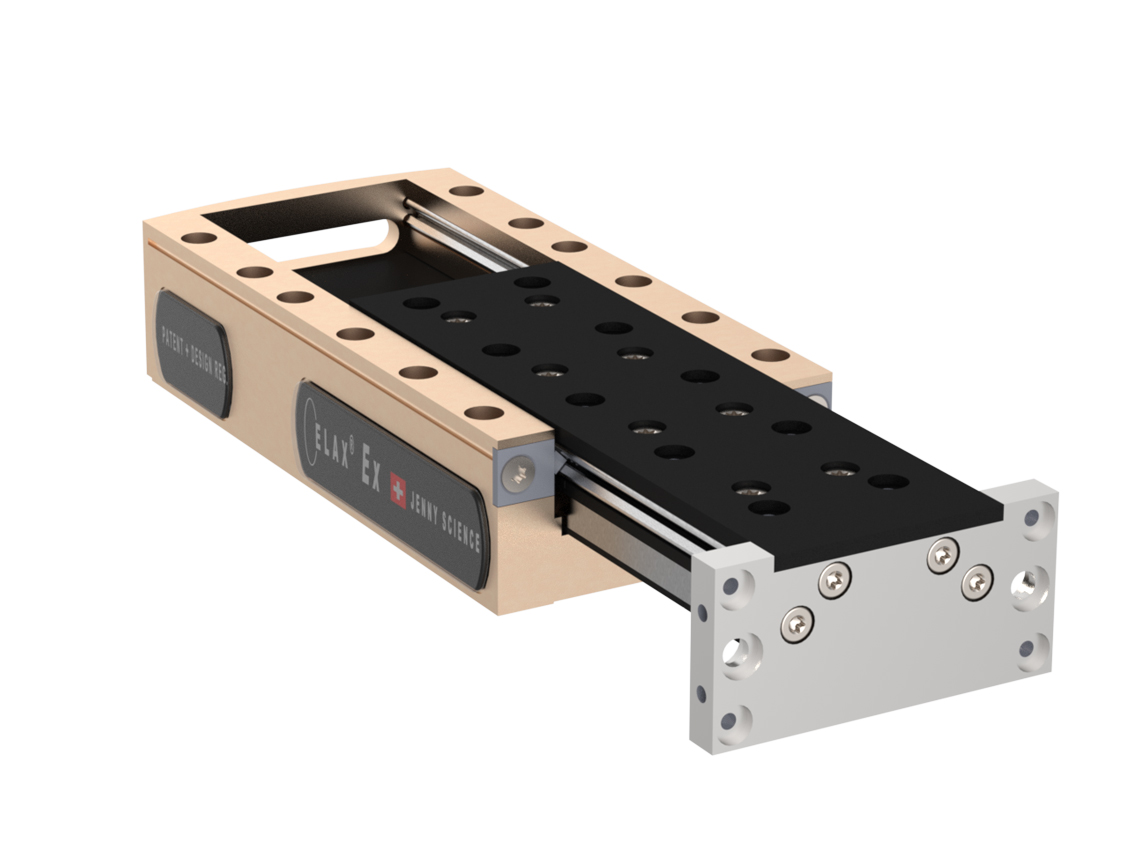
Die elektrischen ELAX® Linearmotor-Schlitten stellen die nächste Evolutionsstufe der weitverbreiteten, pneumatischen Schlitten dar und sind damit prädestiniert für schnelle und präzise Positionierungsaufgaben.

Finden Sie hier diverse Beispiel für Produktanwendungen und Tutorials zu unseren XENAX® Servocontrollern, LINAX® Linearmotor-Achsen und ELAX® Linearmotoren mit integrierter, sensitiven Kraftmessung namens Forceteq®.
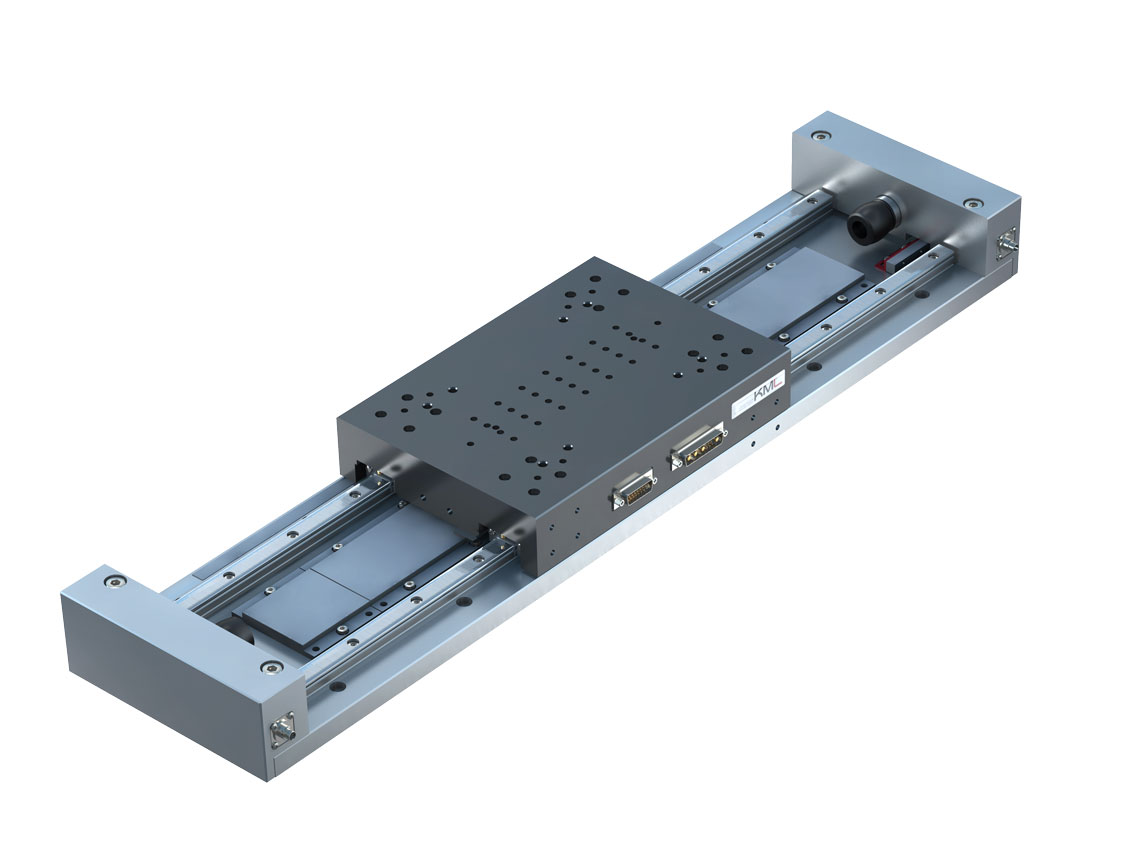
Die KML-Linearmotoren ermöglichen eine Kombination aus Präzision und Dynamik bei der Bewegung von grossen Lasten oder über lange Hübe. Die Linearmotortechnik garantiert eine lange Lebensdauer bei sehr geringem Wartungsaufwand.
Bei horizontalem Einsatz der Linearmotor-Achse wird die Last mit der Vortriebskraft des Linearmotors bewegt. Ein vernünftiger Ansatz ist, den Linearmotor-Typ so auszuwählen, dass die maximale Last noch eine Beschleunigung von 1 g = 9.81 m/s2 zulässt. Also noch eine Beschleunigung wie im freien Fall, das ergibt eine mittlere Dynamik.
Unter dieser Annahme kann die entsprechende Last sehr einfach aus der Achsbezeichnung errechnet werden. Für die Beschleunigung nutzen wir die Spitzenkraft, diese ist bei unseren Linearmotoren das Dreifache der Nominalkraft.
Es können auch höhere Lasten bewegt werden, dabei reduzieren sich Beschleunigung und Geschwindigkeit und die Fahrzeit dauert länger. Dabei sollte noch eine Beschleunigung von ½ g erreicht werden, diese Maximallast ist dann das Doppelte der oben berechneten Lasten.
Die mechanischen Führungen sind für wesentlich grössere Kräfte ausgelegt, als der Linearmotor bewegen kann. Damit sind vertikale Füge- oder Einpressvorgänge problemlos möglich. Diese Maximallasten finden Sie unter "Belastungskennwerte" im Dokument LINAX® Lxx (PDF) oder ELAX Ex F20 (PDF).
Unsere Linearmotor-Achsen sind auf eine Maximalgeschwindigkeit von 4 m/s ausgelegt. Dabei muss eine entsprechende Distanz gefahren werden können. Diese Daten können wir mit unserem "Cycle Calculator" gerne für Sie berechnen.
Die maximal mögliche Beschleunigung und die maximale Vortriebskraft lässt sich direkt aus der Motorbezeichnung ableiten.
Der Wert "....F60" entspricht der Nominalkraft von 60 N (100% Einschaltdauer)
Die Spitzenkraft ist das Dreifache der Nominalkraft, hier also 180 N.
Maximale Vortriebskraft = 180 N
Die Beschleunigung a errechnet sich aus F=m*a -> a=F/m
Beispiel Last extern = 1500 g, mSchlitten = 950 g, siehe Daten LINAX® Lxs xxxF60
m = mSchlitten + mLast extern = 2.45 kg
Maximale Beschleunigung a = 180 N / 2.45 kg = 73.5 m/s2 --> 73.5 / 9.81 = 7.5 g
Bei der Nominalkraft beträgt die Einschaltdauer 100 %. Für dreifache Nominalkraft ist der dreifache Strom notwendig. Die Verlustleistung erhöht sich dabei quadratisch. PV = I2*R. Die Verlustleistung beim Nutzen der Spitzenkraft ist als 9 x grösser. Demzufolge kann die Spitzenkraft nur während einer Einschaltdauer von 1/9 -> 11 % genutzt werden.
| LINAX® Lxc | LINAX® Lxs, Lxu, Lxe | ELAX® Ex | |
|---|---|---|---|
| Kabel | kein Kabel in Bewegung | Kabel am Schlitten in Bewegung | - |
| Wiederholgenauigkeit | bidirektional | bidirektional | bidirektional |
| Temperatur | konstant | konstant | konstant |
| Massstab optisch 100 nm | ±0.4 µm | ±0.5 µm | - |
| Massstab optisch 1 µm | ±1.5 µm | ±2 µm | - |
| Massstab magnetisch 1 µm | ±5 µm (magnetisch nur bei Lxs / Lxu) | ±5 µm |
Die Absolutgenauigkeit ist von der Messpunkt Position in Bezug auf den Encoder-Messkopf veränderlich. Die mechanische Präzision der Linearachse in Bezug auf Rollen, Nicken, Gieren und die Distanz zum Messkopf beeinflussen die Genauigkeit. Die Absolutgenauigkeit kann letztendlich nur gezielt auf einen Messpunkt auf dem mechanischen Aufbau vermessen werden. Wir können solche Messungen mit dem Laserinterferometer durchführen.
Die linearen Massstäbe haben eine temperaturabhängige Längenvariation welche den Fahrweg beeinflussen.
Beckhoff (EtherCAT), SIEMENS (Profinet), B&R (Powerlink) AllenBradley/Rockwell (Ethernet/IP), CanOpen
Labview, C-Sharp, …. (offene ASCII Protokoll)

Leiter Verkauf
Verkaufsgebiet nach PLZ: 1000 - 2999 und 6500 - 6999

Produktmanager
Zuständigkeits-Bereiche:
LINEAR MOTION & NC-RUNDTISCHE & DREHMODULE